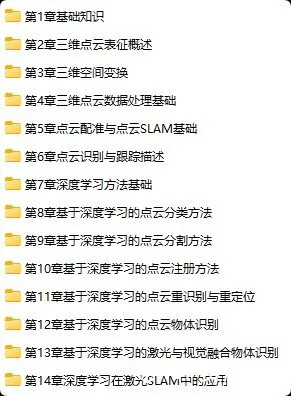
最近我发现了一个系统地剖析自动驾驶中点云处理技术的应用案例资源,它详细构建了点云知识体系,并深入梳理深度学习在这一领域中的前沿任务与热点问题。这个系列的资料让我能够更好地掌握当前的研究趋势和发展方向。
该套资源包含了一系列精心准备的教学视频和文档材料。首先,让我来介绍一些关键资源:
- 有关激光雷达原理、安装标定以及同步的基础教学视频
- 数据采集的详细说明
- 涵盖编程入门基础的内容,让你从零开始也不必担心技术障碍
例如,在第1章中,“激光雷达安装与标定”和“数据采集”的专题内容非常实用。另外,该章节还有配套的作业题以及概述性课件。
更令人兴奋的是里面包括了丰富的辅助材料:
- 详细的用户操作指南文档,如RS-Lidar-32用户手册
- 各类软件安装包和示例数据集,如RSView for Ubuntu 16.04 和 Windows的版本以及配套使用的测试数据 RS_32_data.pcap等
所有这些材料都存储在一个精心组织的文件夹里面,并且提供了详细的点云特征及描述的教学内容,在第2章“三维点云表征概述”中尤为突出。
这里我要强调一点,整个学习过程非常系统化。你不仅可以学到基础知识点,还能够通过实际任务来巩固所学知识。从激光雷达的安装到数据采集的基本流程和原理,再到对深度学习在3D点云处理研究中的前沿进展,这个资源确实涵盖了从初级入门到进阶应用的所有内容。
那么对于初次接触或想要深入探讨这一领域的同学,我的建议是:
- 首先通读课件与概述文档:确保你对整个知识体系有全面的把握。
- 接着详细观看视频教学内容
- 动手实践作业题和查阅资料库中的参考文献:这一步将帮助你在理论基础上培养实际操作能力,同时也可以深入了解最新的研究成果和趋势。
这样一套完整的知识体系与实操流程,让我感到非常满意。如果你也是一位致力于掌握点云处理技术或深度学习应用于3D大数据研究的同学,那这套资料绝对是你不容错过的宝藏。
总结:
总的来说,这是一个包含了从理论教学到实践操作的全面体系,无论是对于初学者还是进阶者都非常有价值。希望每个认真研习的人都能在自动驾驶技术领域更进一步。
│ │
│ └─reference
│ apollo-modules-drivers-velodyne.zip
│ Fast segmentation of 3D point clouds A paradigm on LiDAR data for autonomous vehicle applications.pdf
│ 基于激光雷达的运动补偿方法_庞正雅.pdf
│
├─第5章点云配准与点云SLAM基础
│ 5-5 SLAM图优化基础 .mp4
│ 5.1-点云配准方法(上).mp4
│ 5.2-点云配准方法(下).mp4
│ 5.3-SLAM基础框架.mp4
│ 5.4-帧间匹配与激光里程计.mp4
│ 5.5-SLAM图优化基础.mp4
│ 【三维点云第1~3章】作业参考.rar
│ 【三维点云第5章】课件.pdf
│
├─第6章点云识别与跟踪描述
│ 6.1-点云关键点检测.mp4
│ 6.2-点云常用特征描述(上).mp4
│ 6.3-点云常用特征描述(下).mp4
│ 【三维点云第6章】作业.pdf
│ 【三维点云第6章】作业批改.rar
│ 【三维点云第6章】课件.pdf
│
├─第7章深度学习方法基础
│ 7-1 深度学习介绍 .mp4
│ 7-2 一种简单的人工神经网络 .mp4
│ 7-3 深度学习网络结构(上).mp4
│ 7-4 深度学习网络结构(下).mp4
│ 7-5 深度学习网络训练优化 .mp4
│ 7-6 点云处理的深度学习介绍 .mp4
│ 【三维点云第7章】优秀作业.rar
│ 【三维点云第7章】作业.pdf
│ 【三维点云第7章】课件.pdf
│
├─第8章基于深度学习的点云分类方法
│ 8-1 点云分类网络设计基础(上) .mp4
│ 8-2 点云分类网络设计基础(下) .mp4
│ 8-3 Pointwise MLP:PointNet,PointNet++(上).mp4
│ 8-4 Pointwise MLP:PointNet,PointNet++(下).mp4
│ 【三维点云第8章】优秀作业v.rar
│ 【三维点云第8章】作业.pdf
│ 【三维点云第8章】课件.pdf
│
└─第9章基于深度学习的点云分割方法
9-1 点云分割网络设计基础.mp4
9-2 Graph-based_KCNet.mp4
9-3 Graph-based_DGCNN.mp4
9-4 Data Indexing-based_SO-Net.mp4
9-5 Convolution-based:pointCNN .mp4
9-6 Convolution-based:KPConv.mp4
【三维点云第9章】优秀作业
【三维点云第9章】作业.pdf
【三维点云第9章】课件.pdf
├─第10章基于深度学习的点云注册方法
│ 10-1 点云注册网络设计基础(上).mp4
│ 10-2 点云注册网络设计基础(下).mp4
│ 10-3 Metric based:3DMatch .mp4
│ 10-4 Metric based:3DFeatNet .mp4
│ 10-5 Regression based:Deep Closest Point.mp4
│ 【三维点云第10章】课件.pdf
│
├─第11章基于深度学习的点云重识别与重定位
│ 11-1 点云重识别和重定位方法.mp4
│ 11-2 Point-to-Point:Flownet3D .mp4
│ 11-3 Frame-to-Frame:Deep Closest Point.mp4
│ 11-4 Frame-to-Frame:DeepVCP.mp4
│ 11-5 Frame-to-Map:L3-Net .mp4
│ 【三维点云第11章】优秀作业
│ 【三维点云第11章】作业.pdf
│ 【三维点云第11章】课件.pdf
│
├─第12章基于深度学习的点云物体识别
│ 12-1 Point cloud Object Detection(上).mp4
│ 12-2 Point cloud Object Detection(下).mp4
│ 12-3 3D Datasets .mp4
│ 12-4 深度学习点云物体识别任务指标.mp4
│ 12-5 点云物体识别网络梳理(上) .mp4
│ 12-6 点云物体识别网络梳理(下) .mp4
│ 【三维点云第12章】课件.pdf
│
├─第13章基于深度学习的激光与视觉融合物体识别
│ 13-1 点云图像融合物体识别基础(上).mp4
│ 13-2 点云图像融合物体识别基础(下).mp4
│ 13-3 视觉物体识别网络梳理.mp4
│ 13-4 RCNN family:RCNN,Fast RCNN,Faster RCNN.mp4
│ 13-5 RCNN family:Mask RCNN.mp4
│ 13-6 YOLO family:YOLO,YOLOv2,YOLOv3.mp4
│ 13-7 点云物体识别网络梳理.mp4
│ 【三维点云第13章】课件.pdf
│
├─第14章深度学习在激光SLAM中的应用
│ 14-1 深度学习与激光SLAM的结合点.mp4
│ 14-2 Deep Lidar Odometry(上).mp4
│ 14-3 Deep Lidar Odometry(下).mp4
│ 14-4 Deep Lidar Loop Closure Detection.mp4
│ 【三维点云第14章】课件.pdf



评论0